Cuerpo rígido
Un cuerpo rígido se define como aquel que no sufre deformaciones por efecto de fuerzas externas, es decir un sistema de partículas cuyas posiciones relativas no cambian. Un cuerpo rígido es una idealización, que se emplea para efectos de estudios de Cinemática, ya que esta rama de la Mecánica, únicamente estudia los objetos y no las fuerzas exteriores que actúan sobre de ellos.
representa cualquier cuerpo que no se deforma; para fines de movimiento se puede suponer que el neumático de un automóvil es un cuerpo rígido.

El movimiento de cuerpo rígido, se analizará considerando que la tierra se encuentra en reposo total, es decir no tiene movimiento de rotación ni de traslación
El movimiento de cuerpo rígido, se puede explicar con las tres leyes de Newton y la ley de Coulomb.
Para desplazamientos de un cuerpo rígido en un plano, las cuestiones son mas simples pues es bastante evidente que un cambio de posición de un cuerpo rígido en un plano, puede ser logrado de modo equivalente mediante una traslación paralela seguida de una rotación en tordo a un punto fijo, o bien la rotación seguida de la traslación.
En el movimiento plano de un cuerpo rígido, siempre existe un punto de el (o de una extensión rígida de el) que tiene velocidad instantánea nula y en consecuencia el movimiento equivale a una pura rotación instantánea del cuerpo en torno de ese punto. Tal punto se conoce como centro instantáneo de rotación.
En el movimiento de un cuerpo rígido siempre existe un punto de él, o de una extensión rígida del cuerpo, que tiene velocidad instantánea cero. Esto significa que en todo instante el cuerpo esta moviéndose como si solamente rotara respecto a ese punto, pero ese punto en general se mueve, de manera que el centro instantáneo describe un cuerpo. El movimiento de ese punto puede ser mirado desde un sistema fijo y en ese caso la curva que describe se denomina curva riel. Si el movimiento de ese punto es observado desde un sistema de referencia fijo al cuerpo, la curva que se observa, se denomina curva rueda.
movimiento del cuerpo rígido
el movimiento del cuerpo rigido, en el caso planar, se puede describir de la suigiente manera:

traslacion y rotacion de cuerpos
Un cuerpo se traslada cuando todos sus puntos se mueven paralelamente y con la misma velocidad, tal como se ilustra en la figura 1a. Un cuerpo rota cuando todos sus puntos giran alrededor de un mismo eje (llamado eje de rotación) con la misma velocidad angular, tal como se ilustra en la figura 1b (en este caso el eje de rotación es perpendicular al plano representado por la hoja de papel que estamos observando y pasa por el
punto O). En general el movimiento del cuerpo será una combinación de ambos.
tralacion
Una traslación es la operación que modifica las posiciones de todos los cuerpos según la fórmula:
donde se cumple


rotacion:
Rotación es el movimiento de cambio de orientación de un cuerpo o un sistema de referencia de forma que una línea (llamada eje de rotación) o un punto permanece fijo.
Una rotación de un cuerpo se representa mediante un operador que afecta a un conjunto de puntos o vectores. Un movimiento rotatorio se representa mediante el vector velocidad angular W, que es un vector de carácter deslizante, situado sobre el eje de rotación. Cuando el eje pasa por el centro de masa o de gravedad se dice que el cuerpo «gira sobre sí mismo».
segun la formula:


Cuando el cuerpo está en traslación pura (o cuando el intereses en analizar su movimiento de traslación), se puede asumir como si fuera una partícula. Son ejemplos:
- Un esquiador deslizándose por una montaña (figura 2a).
- Un ciclista trasladándose (en cuyo caso no hay interés en lo que pasa con la bicicleta, sino con el sistema como u
n todo - figura 2b -).
- El análisis de la traslación de la tierra alrededor del sol (en este caso la tierra se consideraría una partícula).

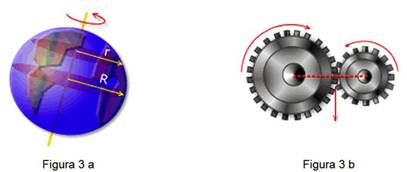
En el caso de querer estudiar la rotación del cuerpo no se puede asumir como una partícula. En la figura 3a se ilustra la rotación del planeta Tierra alrededor de su eje (eje que pasa por los polos). En la figura 3b se ilustra la transmisió
n de movimiento de rotación entre dos piñones.
Un cuerpo sólido rígido realiza un movimiento de traslación cuando, considerando un segmento entre dos puntos A y B del cuerpo, éste se mantiene siempre paralelo a sí mismo, durante todo el movimiento. Considerando el cuerpo rígido como un conjunto continuo de puntos materiales, cada punto material describirá, en el movimiento, una trayectoria determinada y a todos los demás puntos materiales describirán trayectorias equidistantes entre sí.

Movimiento complejo de un sólido rígido, que presenta precesión alrededor de la dirección del momento angular además rotación según su eje de simetría
momento de inercia
El momento de inercia (símbolo I) es una medida de la inercia rotacional de un cuerpo. Cuando un cuerpo gira en torno a uno de los ejes principales de inercia, la inercia rotacional puede ser representada como una magnitud escalar llamada momento de inercia. Sin embargo, en el caso más general posible la inercia rotacional debe representarse por medio de un conjunto de momentos de inercia y componentes que forman el llamado tensor de inercia. La descripción tensorial es necesaria para el análisis de sistemas complejos, como por ejemplo en movimientos giroscópicos.
El momento de inercia refleja la distribución de masa de un cuerpo o de un sistema de partículas en rotación, respecto a un eje de giro. El momento de inercia sólo depende de la geometría del cuerpo y de la posición del eje de giro; pero no depende de las fuerzas que intervienen en el movimiento.
El momento de inercia desempeña un papel análogo al de la masa inercial en el caso del movimiento rectilíneo y uniforme. Es el valor escalar del momento angular longitudinal de un sólido rígido.

Teorema de Steiner o teorema de los ejes paralelos
El teorema de Steiner (denominado en honor de Jakob Steiner) establece que el momento de inercia con respecto a cualquier eje paralelo a un eje que pasa por el centro de masa, es igual al momento de inercia con respecto al eje que pasa por el centro de masa más el producto de la masa por el cuadrado de la distancia entre los dos ejes:
Ieje = I(CM)eje + MH^2
donde: Ieje es el momento de inercia respecto al eje que no pasa por el centro de masa; I(CM)eje es el momento de inercia para un eje paralelo al anterior que pasa por el centro de masa; M (Masa Total) y h (Distancia entre los dos ejes paralelos considerados).
La demostración de este teorema resulta inmediata si se considera la descomposición de coordenadas relativa al centro de masas C  inmediata:
inmediata:
inmediata:
Muy buen trabajo, se deja explicar bien. ademas los videos son de gran apoyo.
ResponderEliminarmuchas gracias por publicar el tema
ResponderEliminarAaa estudiar se ha dicho
ResponderEliminarReferencia?
ResponderEliminar